Robust Autonomy in Complex Environments
We design algorithms, optimization methods, and control systems that help mobile robots achieve robust autonomy in complex physical environments. Specific goals include improving the reliability of autonomous navigation for unmanned underwater, ground and aerial vehicles subjected to noise-corrupted and drifting sensors, incomplete knowledge of the environment, and tasks that require interaction with surrounding objects and structures. Recent work has considered sensing tasks motivated by underwater surveillance and inspection applications, autonomous exploration under sparse and noisy data, and path planning with multiple objectives, unreliable sensors, and imprecise maps.
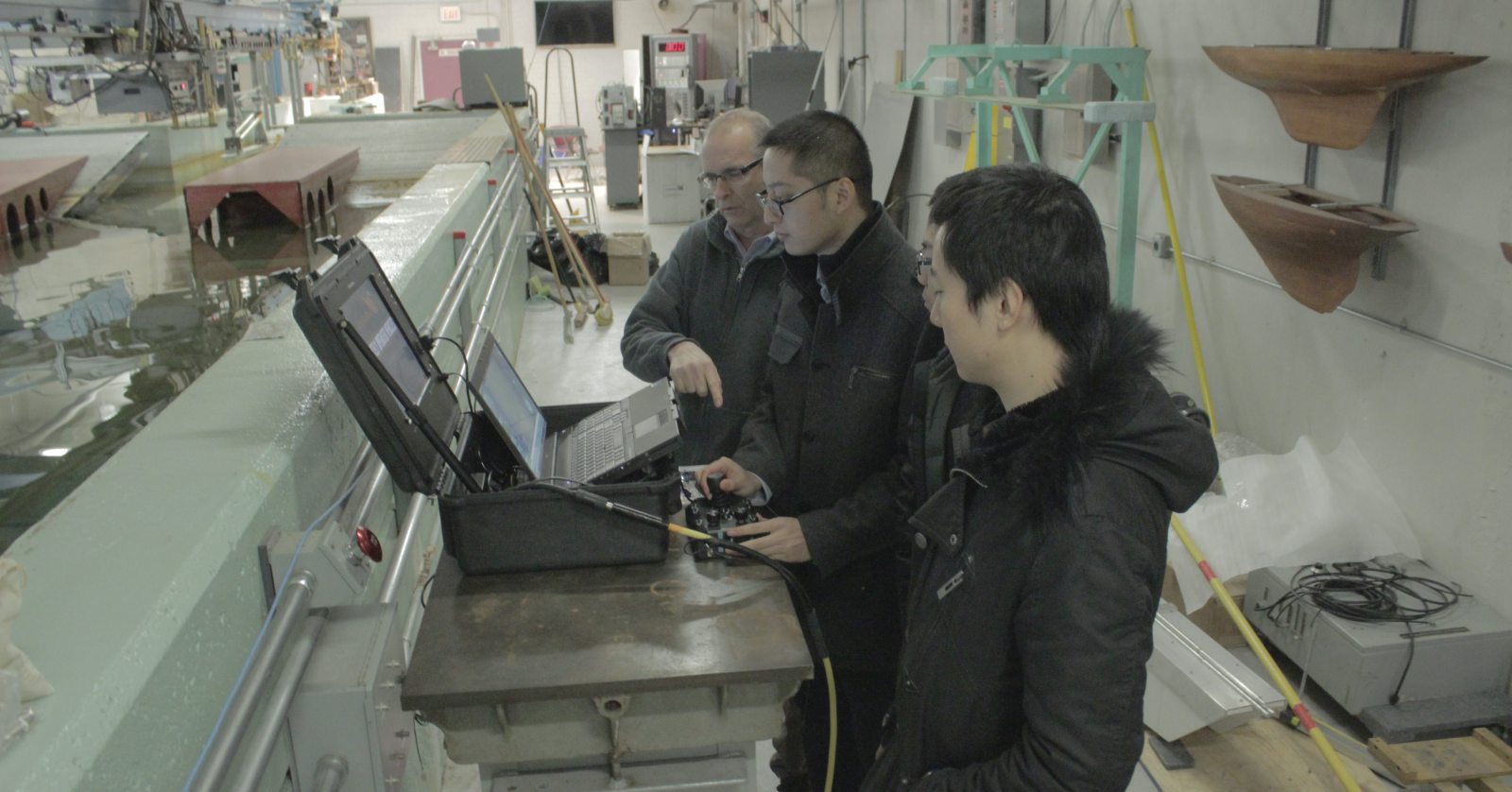


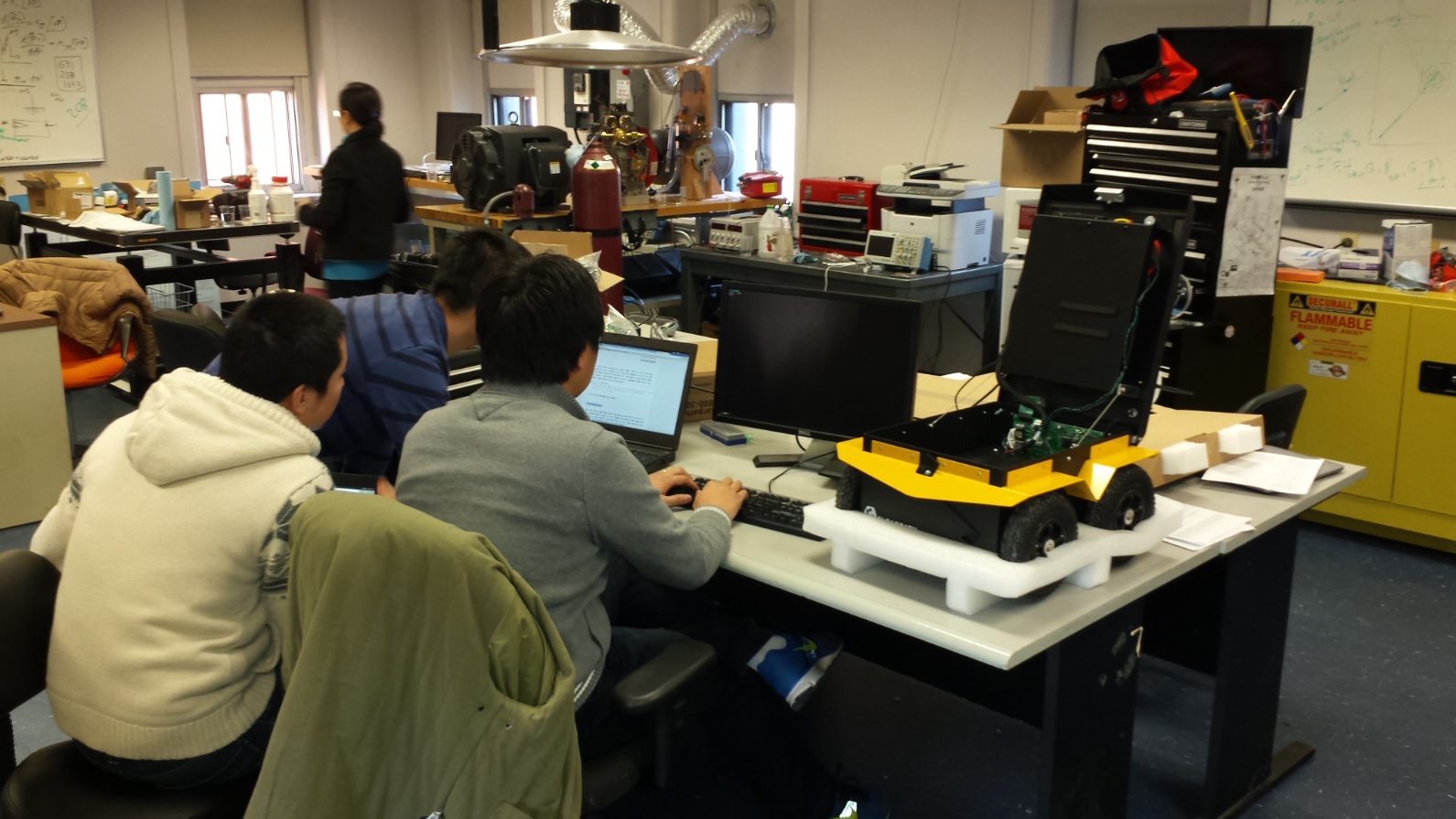
Top: Lab members complete a training session with our underwater robot, the VideoRay Pro4 Remotely-Operated Vehicle. Bottom: Bench-testing our Clearpath Jackal unmanned ground vehicle after a field experiment in Hoboken's Pier A Park.
Recent News:
Sonar-Based Detection and Tracking of Underwater Pipelines
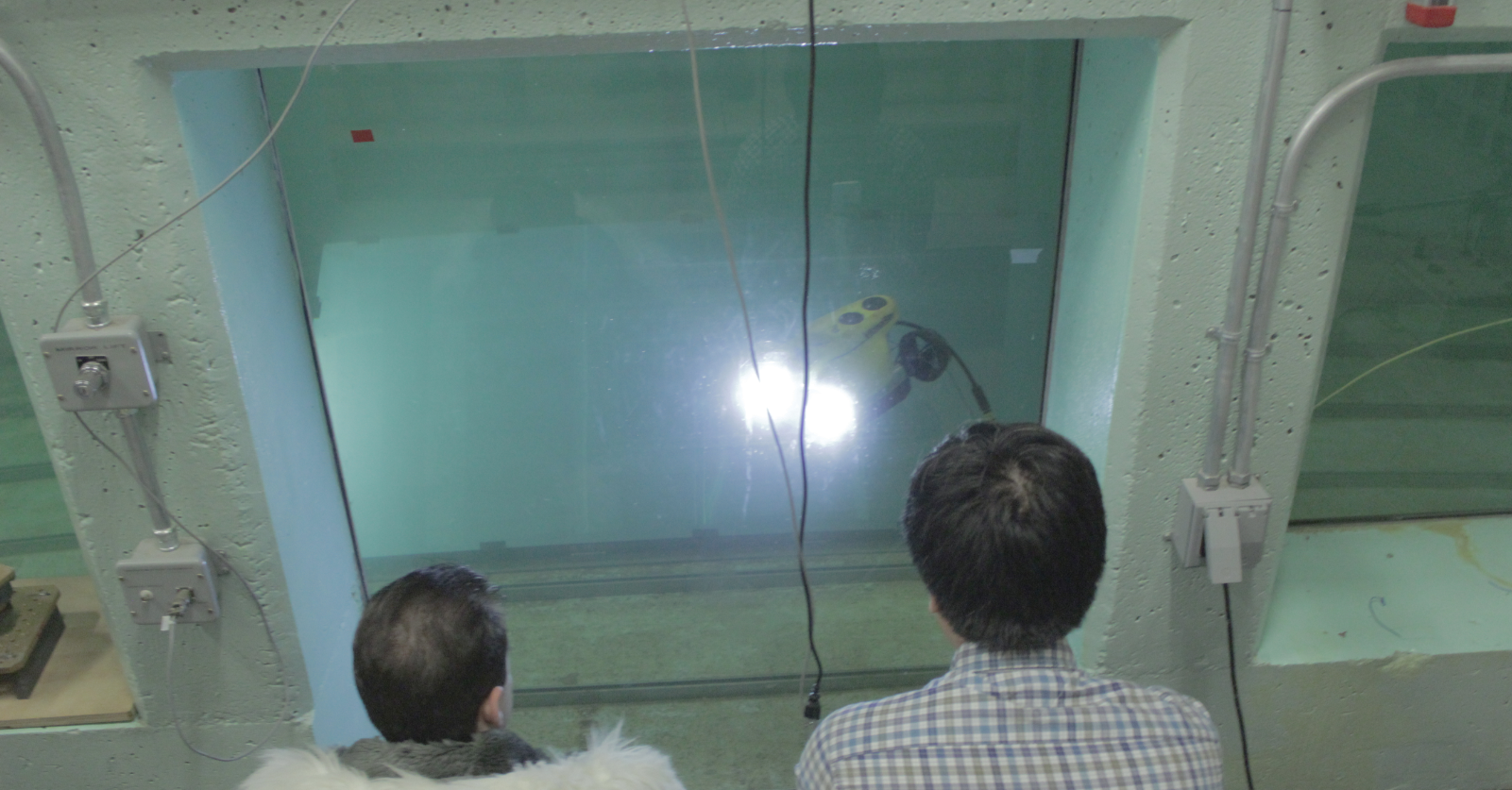
At ICRA 2019's Underwater Robotics Perception Workshop, we recently presented our work on deep learning-enabled detection and tracking of underwater pipelines using multibeam imaging sonar, which is collaborative research with our colleagues at Schlumberger. In the above video, our BlueROV performs an automated flyover of a pipeline placed in Stevens' Davidson Laboratory towing tank.
Learning-Aided Terrain Mapping Code Release
We have developed a terrain mapping algorithm that uses Bayesian generalized kernel (BGK) inference for accurate traversability mapping under sparse Lidar data. The BGK terrain mapping algorithm was presented at the 2nd Annual Conference on Robot Learning. We encourage you to download our library from GitHub. A specialized version for ROS supported unmanned ground vehicles, which includes Lidar odometry and motion planning, is also available on GitHub. The author and maintainer of both libraries is Tixiao Shan.
Marine Robotics Research Profiled by NJTV News
NJTV News recently joined us for a laboratory experiment with our BlueROV underwater robot where we tested its ability to autonomously track an underwater pipeline using deep learning-enabled segmentation of its sonar imagery. The full article describing how this work may aid the inspection of New Jersey's infrastructure is available at NJTV News.
LeGO-LOAM: Lightweight, Ground-Optimized Lidar Odometry and Mapping
We have developed a new Lidar odometry and mapping algorithm intended for ground vehicles, which uses small quantities of features and is suitable for computationally lightweight, embedded systems applications. Ground-based and above-ground features are used to solve different components of the six degree-of-freedom transformation between consecutive Lidar frames. The algorithm was presented earlier this year at the University of Minnesota's Roadway Safety Institute Seminar Series. We are excited that LeGO-LOAM will appear at IROS 2018! We encourage you to download our library from GitHub. The author and maintainer of this library is Tixiao Shan.
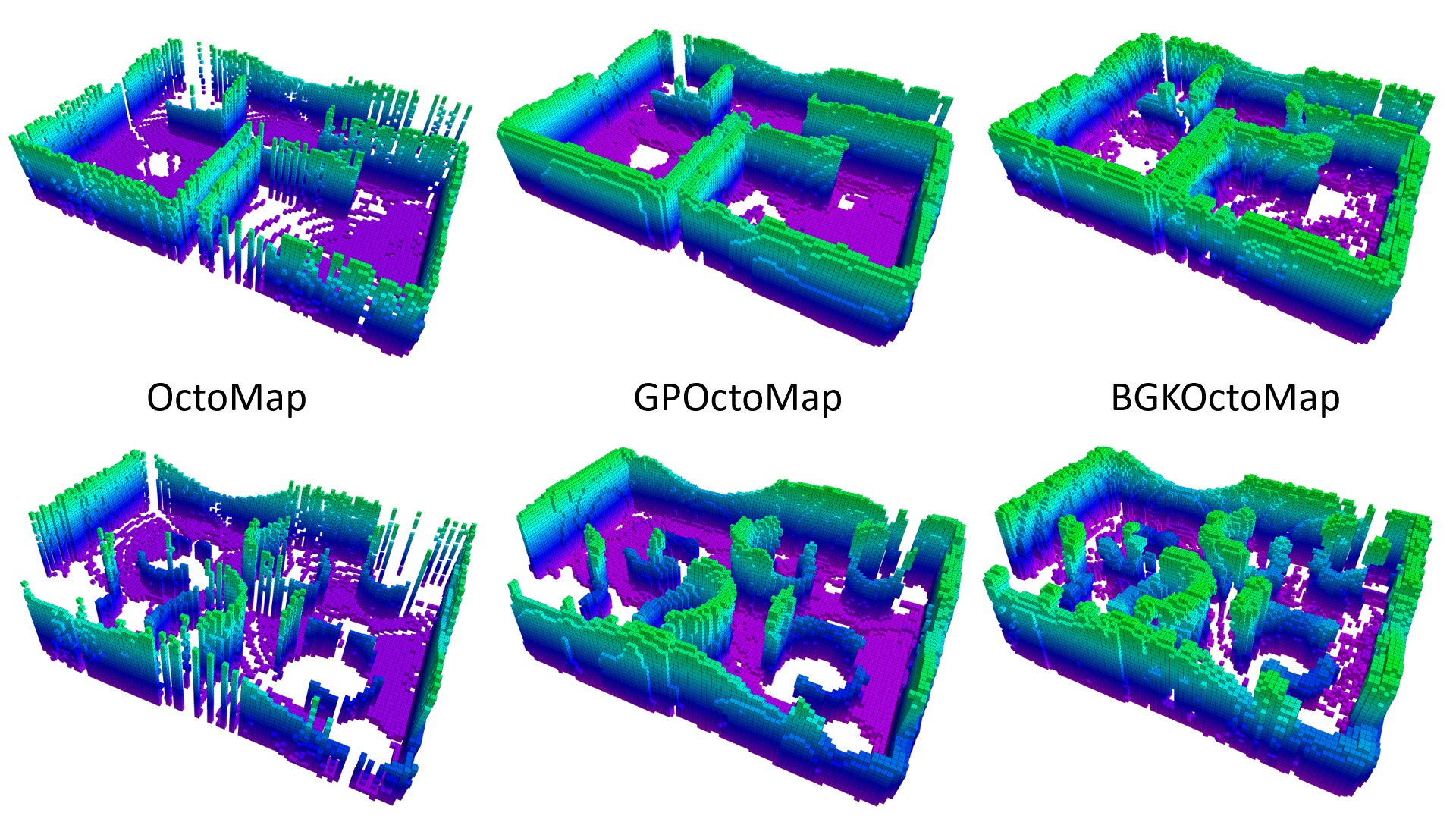
3D Mapping Code Release - The Learning-Aided 3D Mapping Library (LA3DM)
Autonomous Navigation with Jackal UGV
We have developed terrain traversability mapping and autonomous navigation capability for our LIDAR-equipped Clearpath Jackal Unmanned Ground Vehicle (UGV). This work by Tixiao Shan was recently highlighted on the Clearpath Robotics Blog.
ROS Package for 3D Mapping with a Hokuyo UTM-30LX Laser Rangefinder
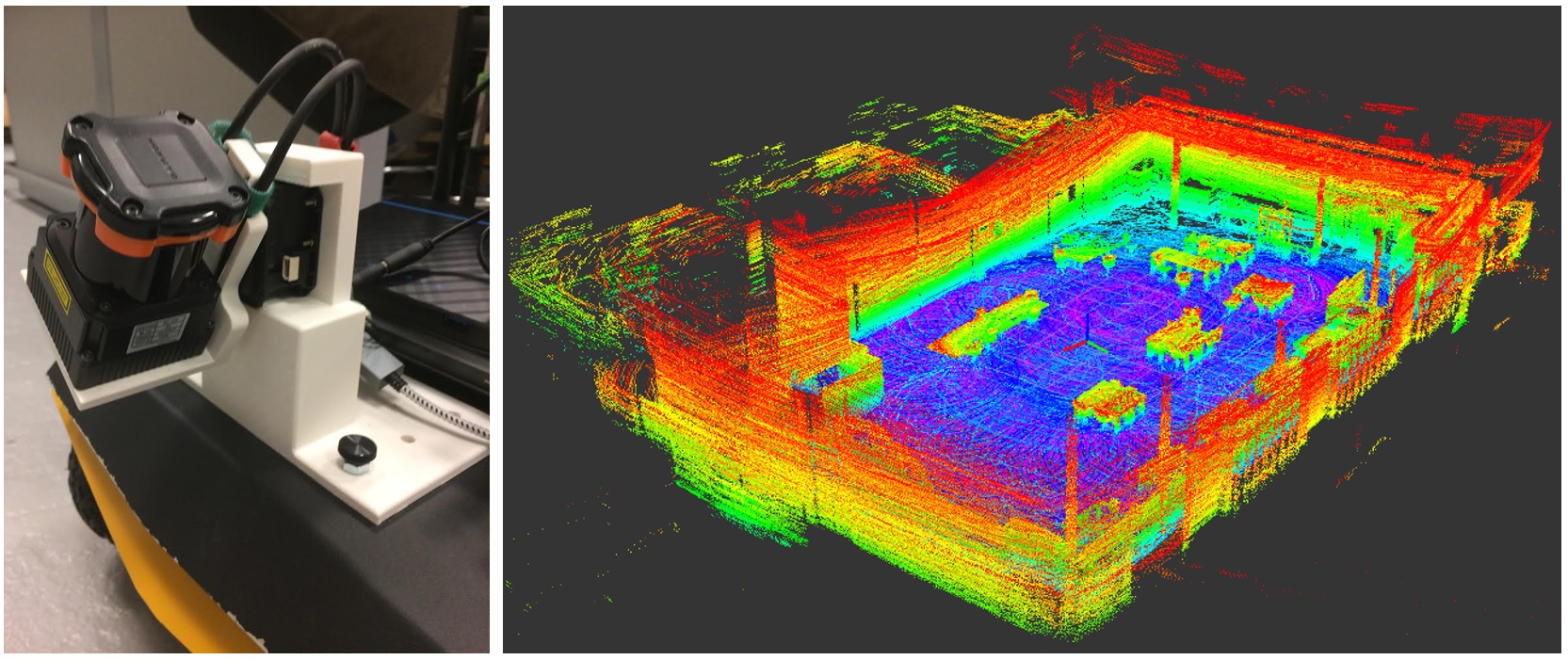
We have released a new ROS package to produce 3D point clouds using a Hokuyo UTM-30LX scanning laser rangefinder and a Dynamixel MX-28 servo. Please visit the ROS wiki page for the package spin_hokuyo for more information on how to download, install, and run our software. The authors and maintainers of this package are Sarah Bertussi and Paul Szenher.
3D Exploration ROS Package for Turtlebot
We have released a 3D autonomous exploration ROS package for the TurtleBot! Please visit the ROS wiki page for the package turtlebot_exploration_3d for more information on how to download, install, and run our software. The authors and maintainers of this package are Xiangyu Xu and Shi Bai.
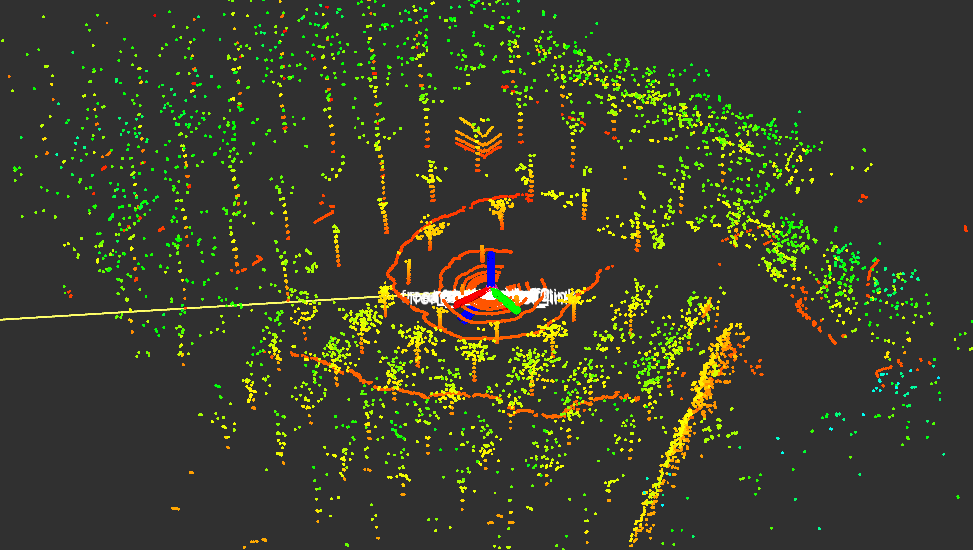
Recent Underwater Localization and 3D Mapping Results
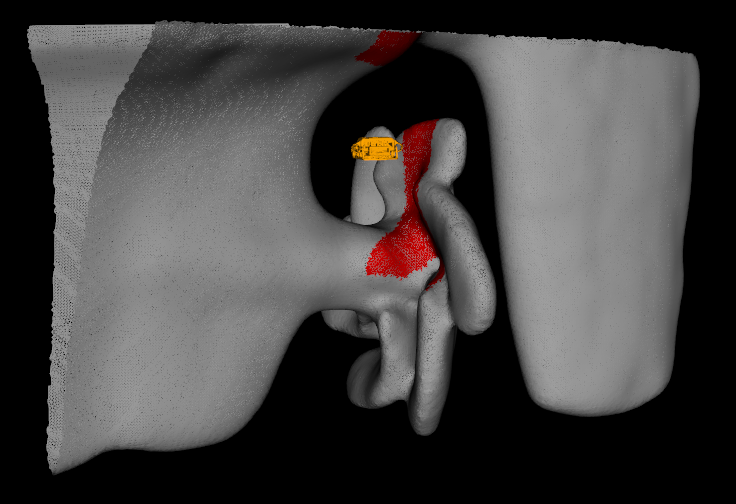
We recently visited Pier 84 in Manhattan to test our algorithms for underwater localization and 3D mapping, supported by a single-beam scanning sonar. See above for a summary of our results from this field experiment, which is detailed in the ICRA 2017 paper "Underwater Localization and 3D Mapping of Submerged Structures with a Single-Beam Scanning Sonar," by Jinkun Wang, Shi Bai, and Brendan Englot.
Moved to a New Laboratory Facility


Our lab recently relocated to the ABS Engineering Center, a newly renovated facility at Stevens that will support interdisciplinary research and education in civil, mechanical, and naval engineering. Our lab sits in the former location of Tank 2, a 75' square rotating arm basin that was built in 1942, whose walls still form the perimeter of the facility.
At top: A photo of the ABS Engineering Center, with the entrance to the Robust Field Autonomy Lab at bottom center. The former rotating arm of Tank 2 is visible at top.At bottom: Members of the lab at the ABS Engineering Center's grand opening in November 2016.